的调速范围广,过载能力强,能轻松实现频繁的无级快速启动、制动和反转,能满足生产的全部过程中自动化系统各种不同的特殊运行要求, 因此在
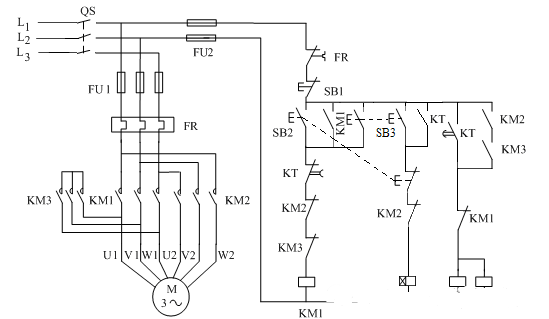
上图中,合上电源开关QS ,按下 SB2 低速起动按钮,接触器 KM1 线 的主触点闭合,电动机 M 的绕组连接成△形并以低速运转。由于 SB2 的动断触点断开,时间继电器线圈 KT 不得电。
按下高速起动按钮 SB3 ,接触器 KM1 线圈得电并自锁,电动机 M 连接成△形低速起动;由于 SB3 是复合按钮,时间继电器 KT 线圈同时得电吸合, KT 瞬时动合触点闭合自锁,经过一段时间后, KT 延时动断触点分断,接触器 KM1 线 主触点断开, KT 延时动合触点闭合,接触器 KM2 、 KM3 线 主触点同时闭合,电动机 M 的绕组连接成 YY 形并以高速运行。
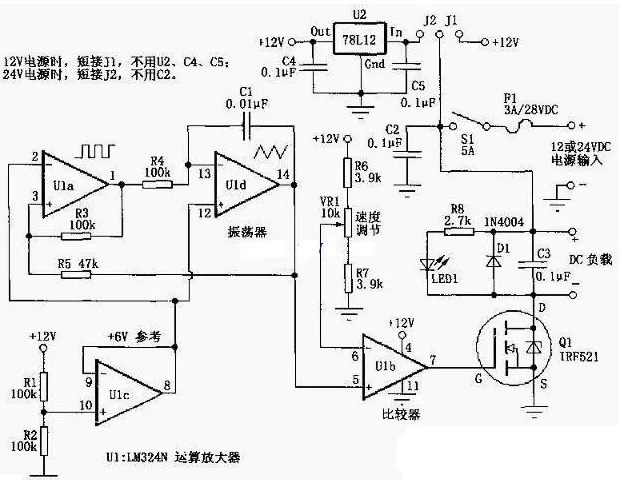
图中,由U1a、U1d组成振荡器电路,提供频率约为400Hz的方波/三角形波。U1c产生6V的参考电压作为振荡器电路的虚拟地。这是为了振荡器电路能在单电源情况下也能工作而不需要用正负双电源。
U1b这里接成比较器的形式,它的反相输入端(6脚)接入电阻R6、R7和VR1,用来提供比较器的参考电压。这个电压与U1d的输出端(14脚)的三角形波电压作比较。当该波形电压高于U1b的6脚电压.U1b的7脚输出为高电平;反之,当该波形电压低于U1b的6脚电压,U1b的7脚输出为低电平。由此我们可知,改变U1b的6脚电位使其与输入三角形波电压进行比较。
就可增加或减小输出方波的宽度,实现脉宽调制(PWM)。电阻R6、R7用于控制VR1的结束点,保证在调节VR1时能轻松实现输出为全开(全速或全亮)或全关(停转或全灭),其实际的阻值可能会结合实际电路不同有所改变。
D1是用来防止电机的反电动势损坏Q1。 当使用24v的电源电压时,图1电路通过U2将24V转换成12V供控制电路使用。而Q1可以直接在21v电源上,对于Q1来讲这与接在12v电源上没什么区别。
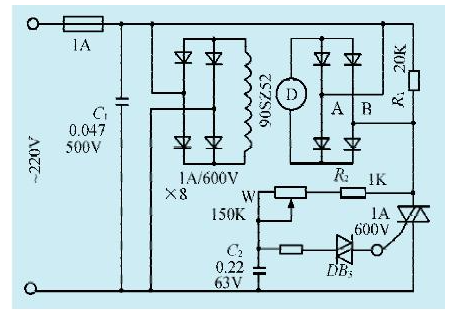
在AB两端产生的被调电压经全波整流后供给电机的电枢绕组,调节W进而达到调速的目的。值得指出的是:
是因为:此时双向可控硅导通时间相当短,在电机反电势的影响下,已处于导通与截止的不稳定临界状态。
解决的办法是设法降低双向可控硅反电势负载的影响,给电枢两端并接假负载电阻,使可控硅在导通角小时也能正常工作。
此电阻的选择应以消除电机低速跳动为准。本人给某一机床所用70W电机并接1k?电阻即可消除跳动。
但在电枢两端并接电阻带来功耗问题,因为在电机全压高速运行时,电阻上的电压也几乎达到220V,则电阻功耗达48.4W,大到了不能容忍的程度。
然后将电阻并接在整流桥交流两输人端(即图中的AB两点),则电阻的功耗可大大降低。
同样是70W电机,此时所并接的电阻阻值达20k几时也能有效地消除电机的跳动。此时电阻在电机全压高速运行时的最大功耗为2.4W。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉
,之前做的都是低压电的驱动,48V的已经是较高的,现在需要做一个60V的驱动,不好搞。 网上买了一个别人的调压模块来研究: 能够正常的看到接口非常
系统—Simulink仿真 前言 换了个课题组,很多知识点都要重新捡起来。虽然这些
,但只有基础扎实了才会有创新,写着玩玩就当随心记吧,后期有时间会继续记录
原理总图 电力拖动控制管理系统课程设计 中画的一个 A1纸 电子版,图我导出的是600*600像素高清图,可以直接右键另存为,分享给需要的人。 enjoy it! 源PDF戳这
,在电机启动和过载时能够限制电流,并且确保转速静差率≤1%,转速超调量≤10%,同时具有弱磁
电机没有本质区别,其电动汽车配件由定子和转子组成。稍有不同的是,雷奥耐用
电机的电枢电流很小,没有换向困难,一般不安装换向极;此外,为减少转动惯性,转子形状细长,气隙小,磁路不饱和,
器安装在这一些地方,到底会产生什么样的作用,而且本来就比较快的速度,为何需要通过
器在运行中更稳,使用的过程中发挥最大功效,一直是众多使用者的疑问,今天就此问题略作阐述。想要
器的定义脉宽调制的全称为:PulseWidthModulator、简称PWM。
是指利用时间继电器控制电动机的低速或高速运转,通过低速运转按钮和高速运转按钮实现对电动机低速和高速运转的切换控制。
系统设计讲解文档,是一份不错的参考资料,感兴趣的可以下载看看,,,,,,,,,,,
设计与仿真(安徽理士电源技术有限公司怎么样)-该文档为基于Multisim的PWM
设计与仿真讲解文档,是一份不错的参考资料,感兴趣的可以下载看看,,,,,,,,,,,
系统的PID控制与仿真讲解资料,讲解的还不错,感兴趣的可以下载看看…………………………
系统仿真简介文档,是一份很不错的参考资料,具有较高参考价值,感兴趣的可以下载看看………………
器。脉宽调制的全称为:Pulse WidthModulator、简称PWM、
,用两只单向晶闸管反向并联,再用一只电位器将它们的门极连接起来,只用三个元件便可组成一个
Simple DC motor PWM speed control The 555 is ubiquitous and can be used as simple PWM speed control
系统:一、实验目的1.熟悉、了解“电平变换器” 的工作原理及其在“逻辑无环流可逆
这是一个占空比可调的脉冲振荡器。电机M是用它的输出脉冲驱动的,脉冲占空比越大,电机电驱电流就越小,转速减慢;脉冲占空比越小,电机