导读: 本期主要介绍异步电机矢量控制在滞环CHBPWM调制和SVPWM调制下的控制性能对比。
应用PWM控制技术的变压变频器通常为电压源型,它能够准确的通过所需的设计参数来控制输出电压。对于交流电机而言,需要保证其输出电流为正弦波电流,因为只有在交流电机绕组中通入三相平衡的正弦电流才能使其合成的电磁转矩为不含脉动分量的恒定电磁转矩。所以,要对电流采用闭环控制的方法,这比电压开环控制能获得更好的性能。传统SPWM控制技术并未考虑到输出电流的情况,它主要是使得变压变频器的输出电压为正弦波。电流滞环跟踪控制PWM (CHBPWM),直接控制输出电流使其接近于正弦波。而异步电动机为了在电机内产生旋转的圆形磁场,从而发出恒定电磁转矩,所以要向异步电机输入三相交流电源。根据这一特性,若将逆变器和异步电机视为整体,按照跟踪圆形旋转磁场来控制逆变器的工作状态,其响应能力会更好,这样的形式又称为磁链跟踪控制,即电压空间矢量PWM(SVPWM)控制技术。
为了更好地对异步电机在不同控制策略下的运行特性,本文采用Matlab/Simulink软件设计了电流滞环跟踪控制技术和电压空间矢量控制技术的数学模型并加以实施在异步电机上,对异步电机在两种控制方式下的运行特性作对比分析。
滞环电流控制基本思想就是给定三相电流信号,并且与由电流传感器实测的三相电流相比较,以其差值通过滞环比较器来控制功率开关使实际电流值跟踪上参考电流值。
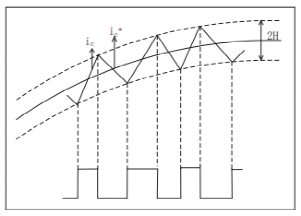
图1为滞环电流跟踪控制的原理图,H为滞环比较器的环宽。在工作时ic_ref 与ic做差,得到的误差电流 ic 且始终处于以 0 为中心,H和 -H 为上下限的滞环内。H的设置是为了尽最大可能避免逆变器开关状态变换的速度过快,在ic_ref的基础上设计了上下两个宽度为h的误差滞环。
具体工作过程为:当ic_ref- ic > H时,滞环比较器输出高电平,驱动上桥臂的开关器件S1导通,使ic增大,当ic增加到与ic_ref相等时,滞环比较器仍然输出高电平,S1保持导通,ic继续增大;当ic - ic_ref > H时,滞环比较器翻转,输出低电平信号关断S1,并经过死区时间后驱动下桥臂的开关S4.但此时S4未必导通,因为ic(负载电流)并未反向,而是通过续流二极管D4维持原方向流通,其数值逐渐减小。
通过滞环控制,逆变器的实际输出电流与给定值的偏差保持在-h~h之间,在给定电流上下做锯齿状变化。当给定电流为正弦波时,输出电流也十分接近正弦波。
滞环电流控制法具有控制精度高,响应速度快,电流跟踪能力强等优点。但是滞环宽度 H 的选取合适与否,会直接影 响补偿电流跟踪指令电流,进而影响谐波补偿效果且滞环电流控制因为电流纹波大,开关频率不确定,所以很少被采用。
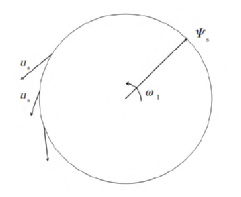
在传统的PWM变压变频调速系统中,通常使用六拍阶梯波逆变器为交流电机提供电源。此时的电压空间矢量运动轨迹如图2所示,三相逆变器—异步电机调速系统主电路原理图如图3所示。
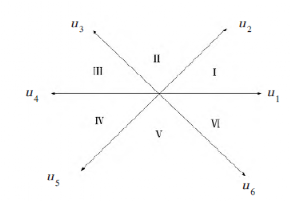
逆变器采用的是上、下管换流方式,功率管共有八种工作状态。对于这种六拍阶梯波的逆变器而言,输出的每个周期都一定会出现一次有效工作状态且状态切换间隔为π/3。为便于讨论将正六边形电压矢量转换为放射形式,如图4所示。各电压空间矢量间的相位关系仍然不变,这样可把逆变器的工作周期划分为6个扇区。
在一个周期内,逆变器开关状态序列为100, 110,111,000,000,111,110,100。在实际工程中,系统应最好能够降低开关状态变化是引起的损耗,因此在每次切换开关状态时,只切换一个开关器件,以满足最小的开关损耗。
综上可知,SVPWM控制模式的特点为:一个工作周期分为了6个扇区,为了使电机旋转磁场逼近圆形使得其控制方式依赖于开关频率的设定。开关切换合理,损耗较小。每个状态的切换以零电压开始,又以零电压结束。采用SVPWM控制方式时,输出侧的线电压基波最大值为直流侧电压,提高了输出能力。
本节讨论了SVPWM控制技术的原理基础,并对其工作特性进行了动态分析,为后面的仿真对比做出了铺垫。
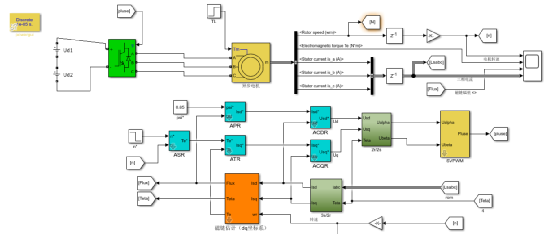
异步电机定子侧为三相绕组,转子侧为闭合的导电条,二者之间通过对气隙磁场的耦合作用进行工作。因此在对异步电机进行仿真时能够最终靠坐标变换的方式来进行解耦以使其具有和直流电机相似的调速特性。本文以Matlab/Simulink为仿真工具来对异步电机的电流滞环控制以及电压空间矢量控制方式来进行对比分析。设定直流电压为540V,异步电机极对数为2,转动惯量为0.067kg·m,仿线 基于SVPWM的异步电机矢量控制管理系统仿线 基于SVPWM的异步电机矢量控制管理系统仿线 基于CHBPWM的异步电机矢量控制管理系统仿线 基于CHBPWM的异步电机矢量控制管理系统仿线的波形对比,基于SVPWM的异步电机矢量控制管理系统的转矩纹波要小很多且在加载和转速突变的情况下,定子电流更趋于正弦。
综上是对异步电机的工作特点做多元化的分析,说明电流滞环控制以及空间矢量控制技术(SVPWM)的控制原理。使用Matlab/Simulink软件以上述两种控制方式对异步电机的仿真结果做多元化的分析研究,实验证明:在SVPWM控制方式下的异步电机的稳定性更高、响应速度更快。
引用地址:基于simulink的异步电机矢量控制的SVPWM和滞环调制对比
上一篇:西门子S7-1200PLC块移动指令MOVE_BLK操作下一篇:西门子S7-1200PLC移动操作移动值指令MOVE推荐阅读
5.6 )SVPWM实现过程 从上节的分析可知,哪几个电压空间矢量和其作用的时间是SVPWM的两个根本的问题。要实现SVPWM,仿真搭建时必须要格外注意和解决的几个问题。 (1)、电压空间矢量所在扇区的判断; (2)、基本矢量作用时间的计算; (3)、基本矢量的作用顺序及扇区切换点时间确定。 只要解决以上3个问题,就能实现SVPWM。 下面我们用一个小例子来理解PWM信号。图2是一个直流电路,它有一个电阻,一个开关,一个灯泡,和一个驱动灯泡的10V直流电压源。我们如何能得到2.5V电压驱动下的灯泡亮度呢? 5.6.1 )SVPWM理论讲解 该状态对应的电机绕组连接图如下:
算法基础(下) /
摘要:针对有源电力滤波器(APF)谐波控制算法存在的问题,提出了一种基于三电平电压空间矢量脉宽调制(SVPWM)技术的谐波控制算法。该控制算法的功率开关频率低,输出谐波电压含量少,抗电磁干扰能力强,实时效果好。对该控制算法进行了Matlab仿真研究,通过实验成功地在APF中验证了其正确性,实验根据结果得出该控制算法具有谐波电压含量少,电压利用率高,补偿性能好等优点,同时证明了该控制算法的有效性与可行性。 关键词:有源电力滤波器;三电平;空间矢量脉宽调制;谐波控制 1 引言 谐波控制算法是APF中最重要的部分之一,它直接影响着APF的补偿效果。在三电平逆变器PWM操控方法中,SVPWM以其易于数字实现、电压利用率高、输出谐波成
的谐波控制算法的研究 /
引言 SPWM变频调速系统由于具有调速范围宽、功率因数高、对电网影响小、电机运行平稳、可有效抑制低次谐波、可实现较大容量等诸多优点,而慢慢的受到人们的重视,一直被视作非常有发展前途的变频方案,慢慢的变多的科研技术人员开始讨论这一课题。由于电力电子技术的快速地发展和智能控制技术的广泛应用,当前人们设计的SPWM电机变频调速系统,摒弃了过去依赖逻辑电路,如比较器、三角波发生器等陈旧的实现方式,而采用高性能MCU加上一些专门的PWM集成电路,如HEF4752、SLE4520等构成。文本介绍的系统由于MC9S12H256具有独立的PWM通道,实现起来更为容量;加之Motorola出品的MCU一向具有产品线丰富,片内资源众多等优点,所以比较
变频调速 /
三相异步电机 三相异步电机有两种接法,分别为三角形接法和Y型接法。具体采用哪种接法,要根据电机铭牌来选择。 国家规定:3千瓦以下的电机采用Y型接法、4千瓦以上的电机采用三角形接法。 Y型接法和三角形接法,如图所示: 单相电机 单相电机内有两个线圈,分别为主线圈和副线圈。由于主线圈截面积比较粗,副线圈截面积比较细,所以主线圈的阻值要比副线圈阻值小。 对于功率比较小的单相电机(比如风扇、洗衣机等) 主副线圈的一端是连接在一起的,所以只引出三个端子。它只需要一个电容,即启动电容和运行电容一体。 接线方法:用万用表测单相电机三个接线端子中的任意两个,能够获得三组数值。电容接阻值最大的俩个端子,零火线接阻值小的两个端子(零线和火线
的接线方法 /
无人驾驶的开发架构是什么? 自动驾驶软件开发基础的架构,逃不出我们大家常常所说的三宝,感知--- 决策(规划)--- 执行(控制),这三个内容,软件开发基础思路都不一样,且听本丝娓娓道来! 感知: 雷达的感知大多都是一些傅里叶变换一类的算法来处理多普勒效应的脉冲波信号,目前主流的都是用C来做代码。雷达的种类很多,这个算法仅仅限于毫米波雷达,激光雷达本丝就不懂了。 摄像头对应的大多都是进行图像处理,虽然说目前Simulink包含对应的图像处理算法模型,但是这些算法模型仅仅对于大家写论文有用,容易出结果,容易仿真!但是实际的算法中大多都是用OpenCV与C++进行柔和使用。 像惯性导航,GPS里面的算法,都是另外一个范
与自动驾驶(ADAS)算法的开发 /
MathWorks推出了2020a版本,具有用于深度学习的扩展AI功能。工程师现在可以在更新的Deep Network Designer应用程序中训练神经网络,在新的Experiment Manager应用程序中管理多个深度学习实验,并从更多的网络选项中做出合理的选择以生成深度学习代码。除了为所有MATLAB和Simulink用户更好的提供的新功能和更新功能之外,R2020a还引入了专对于汽车和无线工程师的新功能。 新版本引入了增强的深度学习工具箱,可帮助用户: 使用新的Experiment Manager应用程序管理多个深度学习实验,跟踪训练参数,并分析和比较结果和代码。 交互式地训练网络进行图像分类,生成用于训练的MATLA
MathWorks公司推出了R2020b版MATLAB和Simulink产品系列。MATLAB中的新功能让用户更轻松地处理图形和创建App,而 Simulink的更新侧重于帮助用户能实现更快速、更便捷的访问。借助新推出的Simulink Online,用户都能够直接通过Web浏览器使用Simulink。R2020b还推出了基于AI(AI)的新产品,用以加快自主系统开发,快速创建无人驾驶3D模拟场景等。 在数百个全新和升级功能中,MATLAB新增了气泡图和分簇散点图;提供了使用MATLAB比较工具对使用App Designer创建的App作比较与合并的能力;以及将自定义的图标和组件添加到您的MATLAB App中等特性。S
摘要:由于异步电机的矢量控制算法很复杂,要达到高性能的目的,必须利用双DSP,使其系统的整体性价比下降。为解决这一问题,本文利用现场可编程门阵列(FPGA),设计一种智能控制器来完成一系列复杂控制算法,实现了异步电机矢量控制速度控制器的专用集成电路。该电路对研制具有自主知识产权的矢量控制异步电机变频调速专用芯片有着十分重要的意义。 关键词:异步电机 矢量控制 现场可编程门阵列 智能控制器 控制算法 可靠性和实时性是对控制管理系统的基础要求,最初的电机控制都是采用分立元件的模拟电路。随着电子技术的进步,以脉宽调制(PWM)为基础的变频调速技术已大范围的应用于电机控制中。在数字化趋势广泛流行的今天,集成电路甚至电机控制
在电路仿真中的应用
用于开发无人驾驶的新特性
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!第三期考题上线,跟帖赢好礼~
Nexperia公司做了一份报告《Application SpecificMOSFETsand GaN Solutions forthe Automotive Market》,主要从GAN的视角来看,里面 ...
MPS的Raghu Nathadi写的这篇文章很不错,进行摘录。●HPC控制器的电源设计无人驾驶和高性能计算(HPC)化转型在逐渐升温,车企和一级供应 ...
DoIP网络逻辑图一般来说,在工程师或者售后人员控制下的网络节点被称为外部测试设备(External TestEquipment),外部测试设备向车辆发送 ...
DoIP系统物理层和数据链路层车载以太网的物理介质连接可使用符合IEEE 802 3 100BASE-TX的连接和一条激活线的使用场 ...
CANape/vMeasure exp控制OUTMM输出PWM波的方法
1 内容梗概CSM OUT MiniModule是信号输出模块,可输出模拟变量和数字信号。能够最终靠CSMconfig来设置OUTMM功能,并使用CAN报文来控制OUTMM ...
最新更新手机版站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口
数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云: